Below are short descriptions of research projects available for postgraduate students in our group at the University of Auckland. If you are interested in any of these, please contact us for technical questions. For questions around enrollment at the University of Auckland, please go here. Scholarships may be available for the best applications through the University of Auckland, or the Dodd Walls Centre.
the Auckland volcanic field
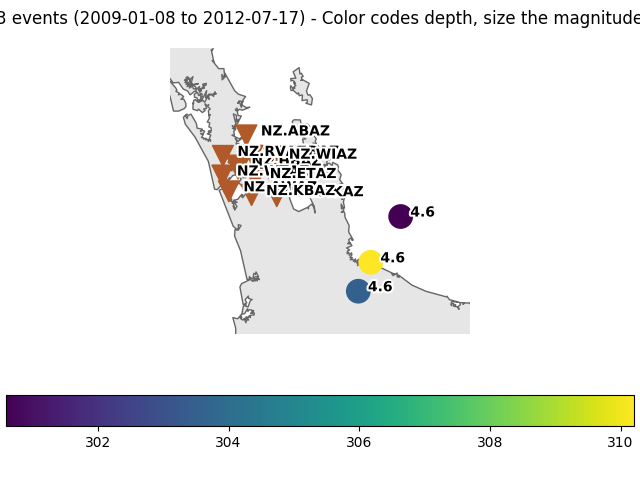
We have a Marsden Fund Grant to study the Auckland Volcanic Field, with funding for a PhD and an MSc student in seismology. There are opportunities for field work on land and at sea.
Background:
Auckland, New Zealand’s largest city, sits on an active, monogenetic, and intraplate volcanic field. An international team of geoscientists from New Zealand, the USA, and China have joined forces to investigate why this volcanic field exists. An on- and offshore temporary seismic network will provide the density and the aperture of sensors to create the first high-resolution three-dimensional image of the Auckland Volcanic Field (AVF) from the surface to deep in the Earth’s mantle, beyond the depths of the magma that feeds the AVF. The resulting image will then constrain geodynamic modelling of mantle flow to explain what controls the AVF, and with it, this class of intra-plate volcanic fields.
ResonanT Ultrasound Spectroscopy
Resonant ultrasonic spectroscopy fills an important gap between our ultrasonic and seismic research. Together with the PORO lab, we have rock samples to complement laser ultrasound and a host of other petrophysical data with new RUS results.
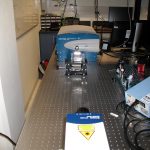
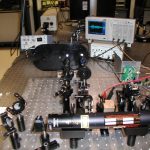
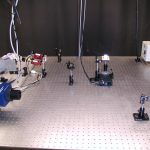
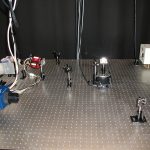
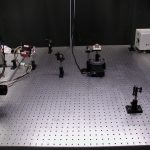
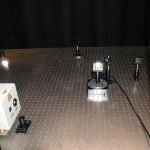
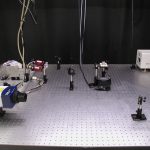
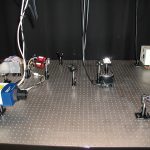
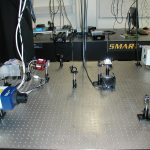
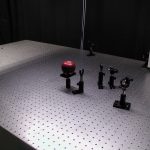
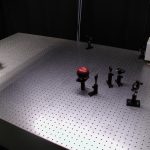
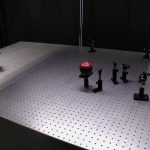
Laser ultrasonic rock physics under high pressure and temperature
The PAL and PORO lab join forces by combining our respective strengths in laser ultrasound and rock physics to improve data quality and quantity. In this project, we are building the expertise to do laser ultrasound in a pressure vessel with optical windows. Source/receiver locations are varied under computer control with an arduino-controlled servo rotational stage.
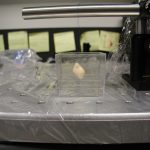
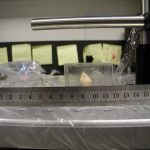
quality control of timber and fruit products with laser ultrasound
Laser ultrasound can be applied to products of interest to a wide community. Current methods of testing the quality of fruit and timber, for example, can often be described by one or more of the following terms: sparse, contacting, expensive, and often destructive. In this project, we aim to explore the opportunities for laser ultrasound in estimating the quality of fruit and timber in a non-contacting and non-destructive matter.








































































































































{kind=link}